@marstears wrote:
VTOL Plane: QuadPlane with forward motor
Firmware: ArduPlane 4.0.9
FC: Pixhawk2 CubeOrangeI followed the wiki to set Q_RTL_MODE=2 to make my plane RTL as a normal fixed wing and loiter to Q_RTL_ALT, and then trans to VTOL to land. But Q_RTL_MODE=2 did not have any effect. The plane RTL as a normal fixed wing and loiter around HOME with RTL_RADIUS. It never doing a transformation to VTOL. I have to change flight mode using MissionPlanner or RC to land it.
I also tyied Q_OPTION=4 as wiki said and use VTOL_LAND mission command, but I got the same result.
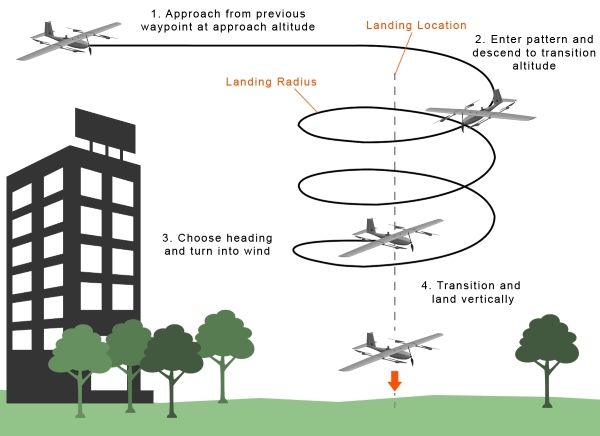
I compiled the 4.0.9 source code to use the quadplane simulator. Sadly, the same test got same result.I just want to make my plane land as this photo.
Please help me. Thanks.
Posts: 9
Participants: 2