@RogerR wrote:
Flew an auto mission the other day and the plane went crazy. After hitting a few waypoints, it erratically headed in the wrong directions for about two minutes. I switched to RTL and the erratic course continued. After a couple more minutes, I switched to FBW-A and landed.
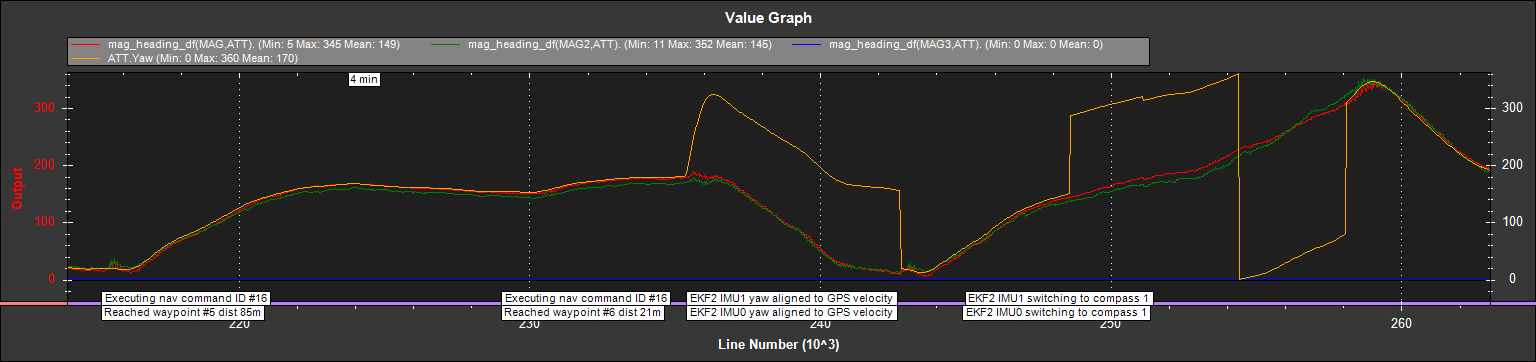
Replaying the mission from the tlog, there are many warnings about compass errors. However,as this graph shows, the two compasses (read and green lines) track each other well and move consistently. But the ATT.Yaw value (yellow line) suddenly jumps about 140 degrees (with an "EKF2 IMU0/1 aligned to GPS velocity message) and stays divergent for about 20 seconds. It then follows the compass heading for ~15 seconds and jumps again (140 degrees with an "EKF2 IMU0/1 switching to Compass 1), diverging for another 20 seconds. The IMU eror messages stop, but sudden divergence from the compasses continue for the rest of the flight.
The log for the flight can be downloaded at https://drive.google.com/open?id=102XR-aZ_ghyLry_TV-1uHo0xI6J0yg80
What should I look at next?
Posts: 9
Participants: 2


















