Hi everyone,
Today I went out with our Foxtech Nimbus to try and improve the flight performance in copter mode. I used the latest beta firmware (3.10 DEV) to have access to the Q_AUTOTUNE functionality. The first flight done was setup to tune roll which the plane managed to complete in roughly 5 minutes. Q_AUTOTUNE was engaged after the platform was stable in Q_LOITER. The flight was thankfully rather un-eventful and we did not find the aircraft “searching” to keep it’s nose in the wind very often.
Here is a link to a shared folder containing the logs and a video of the flight:
https://drive.google.com/drive/folders/1ucuz75uH9rUS2t1DRGB8IxII0ML6Cg8G?usp=sharing
https://youtu.be/gydbxTx_wIU
The next step was to tune Pitch. The flight went rather well however we did find that the platform was continuously searching and yawing to account for wind direction (I suppose that is what it was doing). Unfortunately the flight ended short of completing the autotune due to lack of capacity remaining in the battery pack. This took around 6 minutes.
Here is a link to a shared folder containing the logs and a video of the first attempt at Q_AUTOTUNE PITCH:
https://drive.google.com/drive/folders/1YVny_MephJ2xjtiy-V_mzMqrFJeH5Xqz?usp=sharing
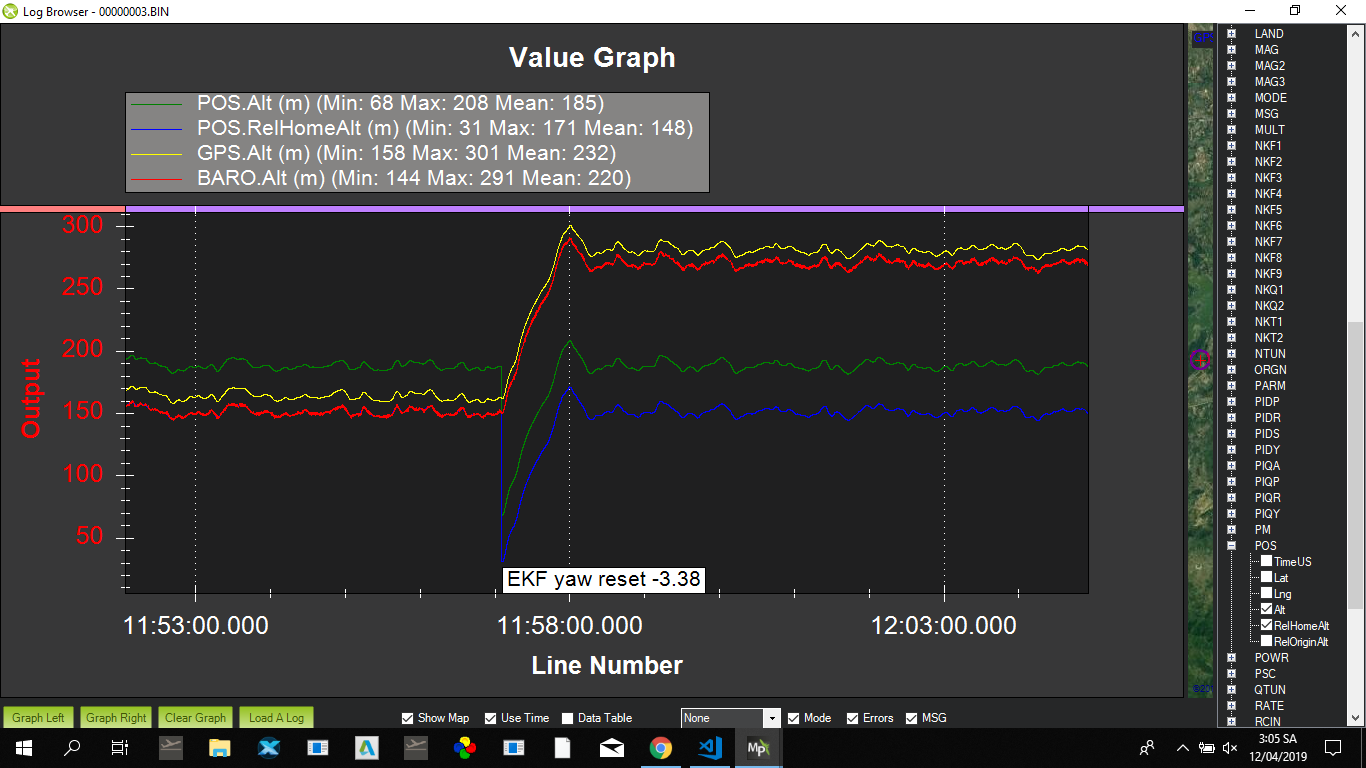
I figured that perhaps the airspeed sensor was creating confusion for the autopilot (CUBE) and that was the reason why it had a hard time finding the wind direction so I decided to disable Q_VFWD and Q_WVANE_GAIN and try again. I may be totally off my mark here with the hypothesis that the airspeed sensor was causing problems so if anyone can clarify whether it is being used in copter modes, I would appreciate it. Alas, we took off and repeated the Q_AUTOTUNE for Pitch. Again, the platform kept circling and yawing trying to adjust for wind direction (there was practically no wind). The battery went down to 21.5 and failsafe alert (no action) was triggered. I decided to just let it play out and push the battery down to 21.1 and land then in the hopes of completing the tune however right at that decision moment the platform went head-over heals (back flip) and crashed nose-down. I did manage to see an EKF_POS error on the screen before it hit the ground. If someone could please diagnose what happened here, I would greatly appreciate it.
Here is a link to a shared folder containing the logs and a video of the second attempt at Q_AUTOTUNE PITCH which ended with a crash:
https://drive.google.com/drive/folders/1-MOs4rP5Mg4lNb9rkXcpTsEaBGmzepMD?usp=sharing
I hope that these logs help the developers improve on Q_AUTOTUNE (if needed) and definitely hope that someone can answer the following questions:
-
Why in Pitch Tuning did the platform move so much? In Roll tuning it barely did any of these yaw dances. The wind was almost non-existant.
-
Does the Airspeed Sensor get utilized in VTOL modes?
-
Most importantly for me, What went wrong that caused the crash?
-
Should Q_VFWD_GAIN be disabled when doing Q_Autotune with Tilt-Rotor Setups?