@Jawnv71 wrote:
I see mention of the code for the Transwing being done on Ardupilot. It looks pretty clever. Is it out in the wild yet? Thanks
Posts: 1
Participants: 1
@Jawnv71 wrote:
I see mention of the code for the Transwing being done on Ardupilot. It looks pretty clever. Is it out in the wild yet? Thanks
Posts: 1
Participants: 1
@aamadeuss wrote:
Hey Guys,
i am flying my mini talon fpv plane for some time now, always starting with an “autotake off” to (takeoff waypoint to 60/100m-> rth) and then take over to cruise mode. No problems so far.
sadly yesterday i totaled my talon
i have no idea what was wrong but it just flipped to the left side and crashed. any idea? logs are here, one of the crash, and one normal flight.
thanks guys, i am super sad about my broken planeit flew so well…
Posts: 1
Participants: 1
@jace26 wrote:
For some time we have experienced intermittent porpoising (pitch oscillations) on our aircraft when transitioning from VTOL to fixed wing flight. Sometimes it will do it real bad (high amplitude), others not at all. Some things that seem to affect it include stiffness of the tail’s mounting (A-tail supported by the vtol booms), and stiffness of the fuselage to wing mount. Any slop in either of those seems to make the porpoise way worse. I notice that both the VTOL and plane controls are fighting to correct this and wonder if this has something to do with this, but I have a feeling the root is in poor plane pitch PIDs.
Has anyone else had this problem?
Can someone look at this log and tell me how you’d adjust the PIDs (specific attention to time 15:50:43) I am in need of someone who is good at PID analysis and am willing to pay for good help and instruction. Autotuning isn’t really an option.
Posts: 1
Participants: 1
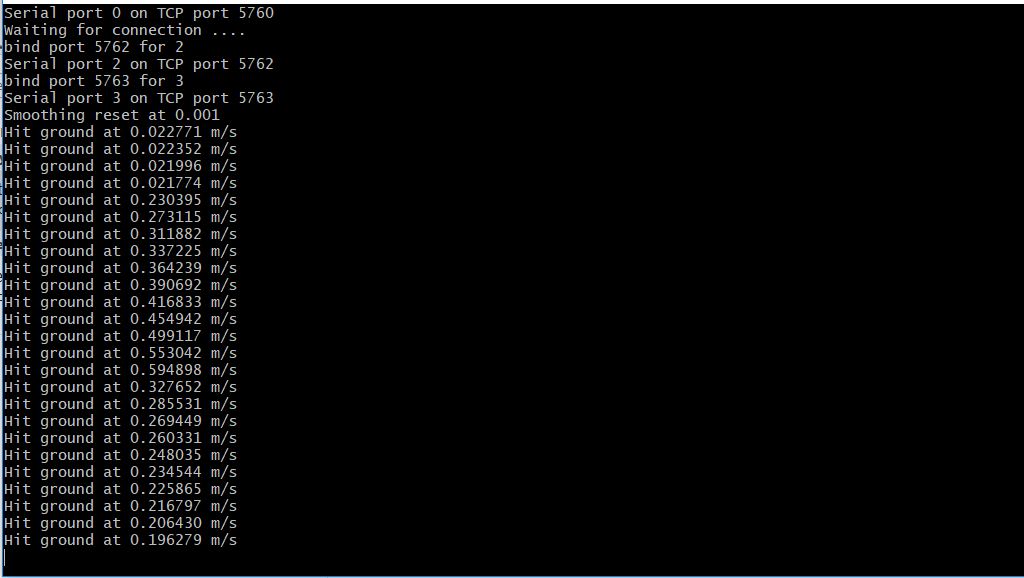
@sdev512 wrote:
I’m running a SITL build from the “plane3.9” branch (not master) and the vehicle starts with a forward velocity after initiation. So, it isn’t armed, but has a forward velocity. I’ve run it through both sim_vehicle.py and straight from the executable from the waf build and each has the same behavior. Images below:
sim_vehicle.py to Mission Planner:
Executable output in cygwin window:
Is there an easy way to stop this? Seems there’s likely a simple solution to this, but I haven’t been able to find anything in the forums/docs.
Thanks,
Scott
Posts: 1
Participants: 1
@darrell wrote:
I finally have my Skywalker X8 quadplane flying well. I’ve run in to an odd issue with RTL behavior. When I do a simple circuit and trip RTL when it’s far away and heading towards home it works just as expected. It’s amazing to watch.
However, I set up a couple of mapping survey grids with Mission Planner and at the end of these there is a RTL command. When that command executes at height the vertical motors come on, the plane sinks and then rolls over. It was easy to recover by switching to FBWA but I did two different grid surveys and it happened both times. There’s a log here if anyone can help out.
Posts: 1
Participants: 1
@disgruntled-patzer wrote:
Hello, I have a query on Ardupilot’s definition of ARSPD_FBW_MAX:
This is the definition from Arduplane parameter list:
“Maximum airspeed demanded in automatic throttle modes. Should be set slightly less than level flight speed at THR_MAX and also at least 50% above ARSPD_FBW_MAX to allow for accurate TECS altitude control.”
The definition from the TECS tuning page:
“This is the maximum airspeed (in metres/second) that the autopilot will use in auto-throttle modes. It should be set to the highest speed that the aircraft can achieve in level flight with the throttle set to THR_MAX. It must be sufficiently above the ARSPD_FBW_MIN value to allow the autopilot to accurately control altitude using airspeed (at least 50% above ARSPD_FBW_MIN is recommended). For electric aircraft, make sure this number is achievable at the end of flight when the battery voltage has reduced.”
For the parameter list, I suppose that “50% above ARSPD_FBW_MAX” is a typo (it should be ARSPD_FBW_MIN, otherwise it makes no sense). But how about the relationship to THR_MAX? The parameter list states that ARSPD_FBW_MAX should be slightly less than the level flight speed at THR_MAX, while the TECS documentation states that they should be equal. Does anybody know which definition is correct?
Posts: 1
Participants: 1
@Graham_Dyer wrote:
Had a quick AUTO flight today with a Nimbus 1800 VTOL but it did something a little unexpected. After the 30m alt transition point, waypoint (#2) was at 60m but the aircraft had only reached 45m by that waypoint and it’s airspeed was only around 10m/s (36km/h), so too slow and very near the stall. Only nearing waypoint 4 once the altitude had reached 60m then suddenly the aircraft sped up to 18m/s (64km/h) before slowing to 13m/s (47km/h), it’s cruise speed.
So why so slow all the way to 60m? The aircraft has enough power to climb at easily 13m/s+ yet it flew so slowly to reach 60m?
Posts: 1
Participants: 1
@hybrid-guy wrote:
How do VTOL’s handle failsafe with RTL? Will it fly back home at the set RTL alt and then transition when it gets close to the home point then land? I haven’t found anything really explaining the RTL operation for VTOL vehicles, and how it handles an RC failsafe… I want to really only use the 900X ground station, and not even use the RC remote at all! I am trying to do all autonomous flights end to end
Ryan
Posts: 1
Participants: 1
@Yellowbird911 wrote:
New set up and first time using the PixHawk. Calibrated radio and all the inputs work properly. Problem is the outputs. Simple airplane, Ele(chan 1), Ail(Chan 2), Throttle(Chan 3). Looking at the servo output screen all the channels work correctly except the throttle which doesn’t move. When arming the ailerons work but the elevators do not. The throttle is on the elevator channel. Very odd and I’ve search everywhere but can not find a solution. Thought about remapping outputs but wanted to post here first.
Posts: 1
Participants: 1
@BlinRichards wrote:
I have a Pixhawk 2.1 that I am using with a spektrum rpm sensor for gas engines.
I have had limited success getting it to work. Most of the time if it doesn’t work when I start the engine I just reboot the pixhawk and try again with limited success.
I decided to look into the issue today and found that when I press the safety button to turn on my servos the pixhawk sets the RPM_PIN parameter to -1, although it doesn’t always show up when I read the parameters I can see on my oscilloscope that it pulls AUX pin 2 (The pin I have the rpm sensor connected to) to a low state and it does not reset until I set the RPM_PIN parameter back to 51.
This appears to be a software issue although maybe the spektrum rpm sensor is doing something weird that causes the pixhawk to disable it. Any incite would be greatly appreciated.
Posts: 1
Participants: 1
@smilie wrote:
what means this message?
I have already used geofence with this pixhawk 2.4.8.
Now with the new ardupilot does geofence not work?thanks
Posts: 1
Participants: 1
@icarus1 wrote:
Hello,
I’m new to this forum, but I’ve been messing around with the px4 for a few months now. Thank you in advance for your help.Recently for a project I’ve been trying to use the altitude_wait command for balloon launches. The command gives 3 parameters: a target altitude to wait for, a downwards velocity in case of early balloon popping, and a time interval for how often to wiggle the servos to keep them from freezing up. I have had no problems in testing with the first two parameters, however, the servo wiggle command had given me some trouble.
Basically, no matter what the “wiggle time” parameter is set to, the autopilot continuously wiggles servo 1 only. I’ve tried many different settings, but no matter what I just get a constant wiggling of servo 1. This is a flying wing design, so there are only two servos, but the second one won’t wiggle and the first one won’t stop wiggling no matter what the interval is set to.
Does anyone have any experience with the altitude_wait command?
Thank you again,
- David
Posts: 1
Participants: 1
@GoFast124 wrote:
I need to have a relay switched using my transmitter. The wiki doesnt show how to do this with ardupilot 3.9. I think i have managed to set up aux5 as a relay output but how do i map an rc channel to control the relay?
Posts: 2
Participants: 2
@stuwe wrote:
dear experts,
i’m stuck with this. whenever i switch to an auto mode - preferably to autotune the plane goes either straight up or bottom down and holds that position until stall or crash. no interest in leveling. when i try to hold the plane around the horizon (which i guess is not the idea of autotune) i can do it for a little while like balancing on a ball but once either too much up or down the plane gets “suck” into either direction and the FC is working hard to hold it there. no input effect to get her out!i’ve done many test flights with all sorts of different parameter settings - from low to high, recalibrated multiple times and and and. on the bench it all looks good except when i switch to any auto mode the servos go a bit crazy - then quiet, then crazy again… just weird. i’ve read on crazy servos on the bench and some guys claim that once the plane is airborne this is gone. it seems to be like that for me as well otherwise i could not hold her for a few seconds.
board orientation is yaw 270 which seems to work according to mission planner AH. however - that would be the most logical thing to me being wrong and i 've experienced some strange required settings in that area in iNav and Betaflight - but the AH simulation looks fine.
I’m using a Matek F405-Wing with the latest firmware. before the whole setup with board, plane etc. was flown with iNav without any issues. so i rule hardware problems out. the plane is also nicely balanced and the controls physically limited and adjusted - just the way it shold be - all fine… until flashing ArduPilot…
after more than 10 test flights the plane has never flown in auto mode. it instantly pulls up or down when any auto mode is engaged!
maybe the video helps to explain…
thanks upfront for any advice that could solve the mistery!!!
these are the current settings of the parameters i think are relevant to this issue and that i’ve played around with.
Bank to 25
Pitch Max to 35
Pitch Min to –20
Stick_mixing to 2
TECS_PITCH_MAX to 35
TECS_PITCH_MIN to –35
(All P,I,D set to 1,0,0 wherever possible)
PTCH2SRV_IMAX to 3000
PTCH2SRV_P to 1
PTCH2SRV_RMAX_DN to 0
RLL2SRV_P to 1
RLL2SRV_IMAX to 3000
STEER2SRV_P to 1
STEER2SRV_IMAX to 4500
STEER2SRV_I to 0
STEER2SRV_D to 0.08
Stall_Prevention to 1
Posts: 2
Participants: 2
@Skifree wrote:
Hi all. I’m trying to set up a Quadplane, and I can’t get my quad motors to spin up.
When I have the mode set to FBWA I can spin the pusher propeller fine. When I switch to Qstabilize, the quad motors just keep on beeping as if there is no input. I have tested that the motors work by using a servo tester to calibrate the ESC’s. I also notice that if the Pixhawk is disarmed, and the safety switch is flashing, the quad motors beep slowly and not together.
When the safety switch is solid, the motors all beep quickly and in unison.Is there something stupid that I’m missing?
I should note that this is the second quadplane I have done, and I also was able to go to the motor test in optional hardware and check the output. on this one, when I try the motor test, Mission Planner comes back with a “denied by autopilot”.
I’ve followed the instructions on the wiki, Everything else seems to be working well. I feel like this is the last major hurdle to get past.
I’m using Arduplane 3.9.8
Any help is much appreciated! Thanks!
Posts: 1
Participants: 1
@Illini_Rob wrote:
I fly Pixhawk 2.1 and Ardupilot (latest beta) on a QuadPlane-converted Parkzone Radian.
Recently I’ve been focusing on performing rapid inbound and outbound transitions because it’s super fun.
I found an interesting behavior.
I increased Q_VELZ_MAX (Pilot maximum vertical speed) to 150cm/s (1.5 m/s for us mere mortals)
The default value is 1m/s.I found that when I actually command maximum climb or descent, it disables yaw control.
That is, during a rapid climb or descent, it holds current heading no matter how far I deflect the rudder stick.
When I command less than full climb or descent with Q_VELZ_MAX set to 150cm/s, yaw control returns.
If I have Q_VELZ_MAX at the default value of 1m/s I always have yaw control.Is this a bug or a feature?
When doing inbound transitions from FBWA to Q_HOVER, I would really like to command a rapid descent rate while simultaneously kicking the tail around so I point into the wind.
If I do a crosswind or downwind inbound transition and lose yaw control, then I’m temporarily stuck in a hazardous tail-to-wind condition until I arrest my descent rate.Any ideas?
-Rob
Posts: 1
Participants: 1
@froly wrote:
Hi everyone! I’ve experienced a strange crash immediately after catapult launch.
I have an elevon plane. Lately we updated firmware from 3.9.2 to 3.9.8 because of SB_0000002. At first takeoff with 3.9.8 something happened with pitch controller, plane dropped throttle and did a nosedive for no reason.
Log file attached: crash log
I would highly appreciate any possible advice!
Posts: 1
Participants: 1
@KadaverJoe wrote:
I have built a new plane and set it up with an Pixhawk 4 and ArduPlane 3.9.5.
I set up my new plane and calibrated all RC inputs. All servos are set up correctly as well. So when I move the sticks of my transmitter in manual mode, everything works normal (if I put my roll stick half to the right, the aileron servos move roughly half their way).
But if I change to FBWA and move my roll stick not even half way, the aileron servos are at their maximum. When I look at the SERVO Output tab in MP, it shows the same pattern.
Is this really normal that apm responses so extreme?Thank you for your help.2019-05-25 16-48-05.tlog (146.3 KB)
Posts: 1
Participants: 1
@hurzburg wrote:
Just hovered my newly converted Convergence in my backyard…only issue is a +/- 30 deg heading yo-yo back and forth…any ideas what is causing that?
I am using the same compass/gps location and type as Greg Covey’s build, BN220…no slop in tilt mechanics…tilt trimmed to 90deg/0deg with servo min/max when in QSTABLIZE/MANUAL and no yaw input…same pids as posted in reference buildyaw control works fine…just slowly oscillates back and forth 30deg at neutral
Posts: 1
Participants: 1
@zillion42 wrote:
Hi,
I’m setting up a new Air frame for my son and I’m using my old APM 2.6. From my understanding the last available Firmware that still runs on the APM 2.6 is Plane 3.3. So I hope I am in the right category.
I have a new receiver, the XM plus mini (2.4GHz Taranis) which outputs SBUS. I flashed the APM 2.6 internal PPM encoder to understand SBUS and all is fine, servos work.
Now I flashed the firmware for the XM+ mini to output RSSI on channel 8, and I can see it’s working in the Radio Setup of Mission Planner.
Obviously I would like Plane 3.3 to understand and read RSSI, so I can setup the long failsafe action. My current version of plane 3.3 does not offer me to choose a Channel for RSSI, so I figured I would try it manually, via Voltage reading. I am familiar with the:
RSSI_PIN and
RSSI_Range parametersNext I set RC8_FUNCTION to Pass-trough and tried to directly connect Output 8 with pin 5. Which doesn’t work.
Basically that is another cable, which is technically not needed and all I want is a proper RSSI reading, hope someone can help me out
http://ardupilot.org/plane/docs/common-rssi-received-signal-strength-indication.html?highlight=rssi
Regards,
Tobi
Posts: 1
Participants: 1
 i have no idea what was wrong but it just flipped to the left side and crashed. any idea? logs are here, one of the crash, and one normal flight.
i have no idea what was wrong but it just flipped to the left side and crashed. any idea? logs are here, one of the crash, and one normal flight.

 )
)