@disgruntled-patzer wrote:
Hi all, for the past couple of days I have been running a couple of simulations on SITL to help my teammate debug a quadplane altitude issue, which he had raised in an earlier thread: Quadplane altitude loss on transition
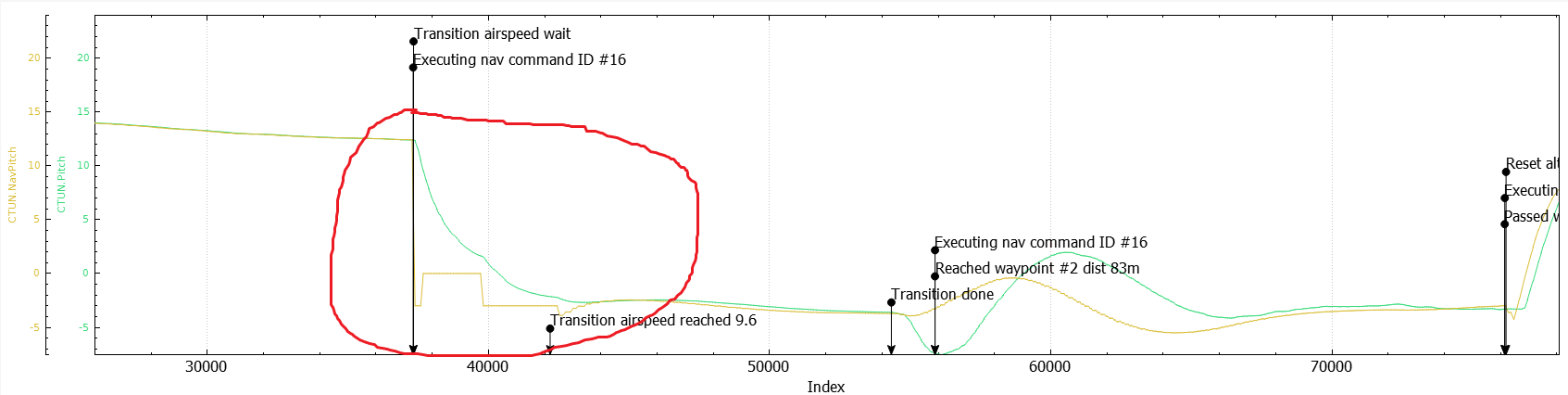
So far I have been doing simple VTOL-takeoff, transition and landing with Plane 3.8.4, and have not observed any noticeable altitude drop. However, I noticed the following: During transition, SITL’s quadplane experienced a negative commanded pitch of -3 to -5 degrees, as shown in the following log image:
Hence, I have two questions which I need help with:
Why does ArduPlane firmware command a negative pitch for quadplanes during transition?
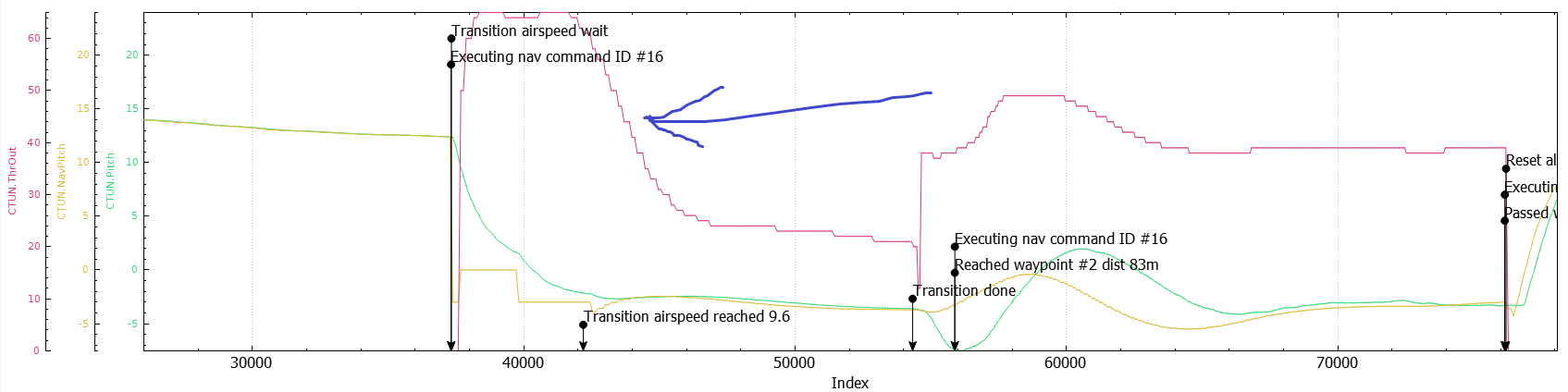
I also observed that the throttle output drops sometime during the transition, and it occurs after transition airspeed is reached, as shown in the next image:
Which leads to my next question: Does this throttle drop, together with the negative commanded pitch, lead to any possible adverse effects for the quadplane, such as loss of altitude?
I have attached a sample log for anyone who is willing to offer their assistance: https://drive.google.com/open?id=1x7x3Wii8_tlpemtvrkA1etSrHM0Be-bn
My test runs so far have been conducted on SITL, with plane 3.8.4 firmware and default SITL parameters (with quadplane mode enabled). It is also worth noting that no observable altitude drop was observed during transition, as compared to the actual quadplane which my team had tested in the earlier-mentioned thread.
Any help from the community would be greatly appreciated!
Posts: 1
Participants: 1